时间: 2024-07-18 18:42:32 | 作者: 常见问题
体系最大的作用是在各种机组运转工况下,确保再热器有满意冷却,在机组发动进程阶段,合作锅炉操控汽压,使机组在发动时的蒸汽参数满意预订要求,即习惯锅炉与汽轮机在发动阶段的特性,加速发动速度;在机组甩负荷时,旁路体系保持锅炉在最低答应负荷下运转,汽轮机转速在3000 rpm,或许带部分厂用电负荷下运转,待毛病扫除今后,可以并网,可以敏捷带负荷,削减停机次数。
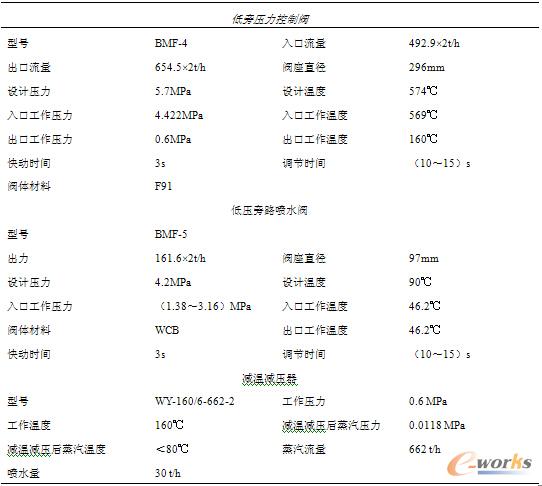
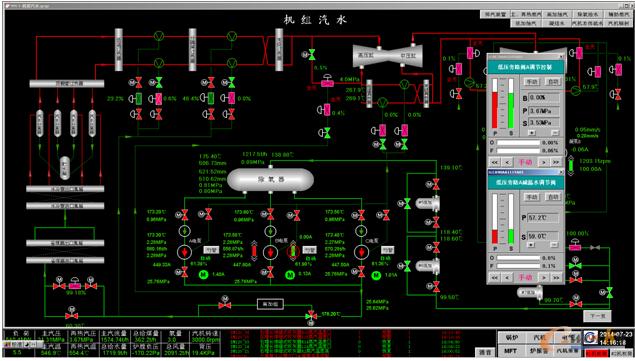
再热凝汽式机组旁路体系大体上分为2级,即高压旁路和低压旁路,高压旁路为锅炉过热器出口蒸汽通过减温减压今后,到再热器进口,低压旁路为再热器出口蒸汽通过减温减压今后,去凝汽器,低压旁路体系设备参数如表1,监督画面如图1。
锅炉上水完毕今后,排汽压力小于30kPa时,锅炉开端焚烧,在此阶段制止敞开低旁;跟着锅炉燃料添加,低旁压力渐渐上升,在汽机冲转前,或许主汽压力到达3.7MPa,主汽温度到达320℃今后,蒸汽流量到达空冷岛最小防冻流量时,敞开低压旁路,将压力操控切为主动,进入压力操控方法,低旁保持再热蒸汽压力(0.8~1.0)MPa,满意冲转、并网、带负荷等运转要求,跟着高中压操控阀的敞开,低旁开度逐步关小,机组并网今后,跟着负荷添加,压力定值升高,低旁逐步封闭。
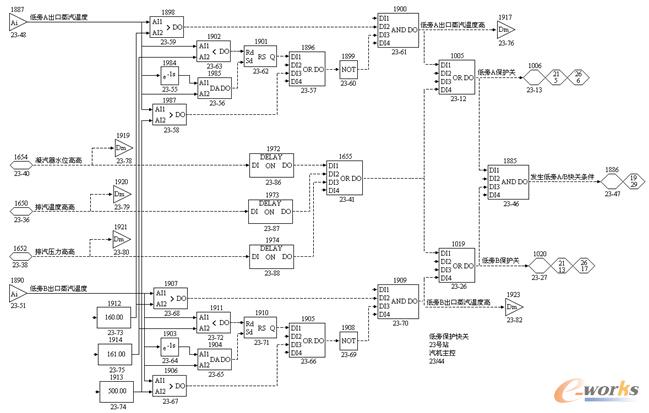
假如低旁A出口蒸汽温度>160.00℃,而且≯500℃,或许<161.00℃时,1s内改变不超越5℃,则宣布低旁A出口蒸汽温度高和维护关信号。
同理,假如低旁B出口蒸汽温度>160.00℃,而且≯500℃,或许<161.00℃时,1s内改变不超越5℃,则宣布低旁B出口蒸汽温度高和维护关信号。
假如凝汽器水位高高、排汽温度高高、排汽压力高高任一条件产生,延时2s,宣布低旁A或许低旁B快关信号。
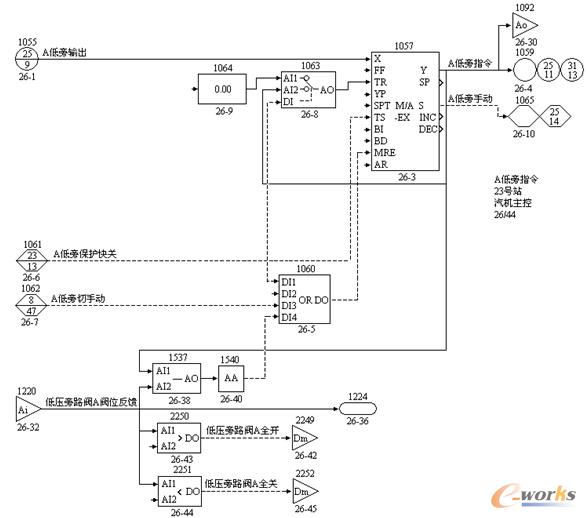
低旁压力操控PID优化算法块1036的进程变量PV为再热蒸汽压力,其设定值SP为榜首级压力通过分段线的值,与运转人员手动给定值比较,进行大选今后的值,进程变量PV与设定值SP之差进行PID运算,输出AO至2输入平衡算法块1038的输入X,低旁A和低旁B均手动时,盯梢方法STR=1,AO=TR=低旁A和低旁B指令平均值,由加法算法块1047通过AI1、AI2的输入系数设置k1=k2=0.5完成,2输入平衡算法块的输出Y1为低旁A输出,Y2为低旁B输出,其偏置BIAS为低旁A指令与低旁B指令之差,分段线 分段线参数设置

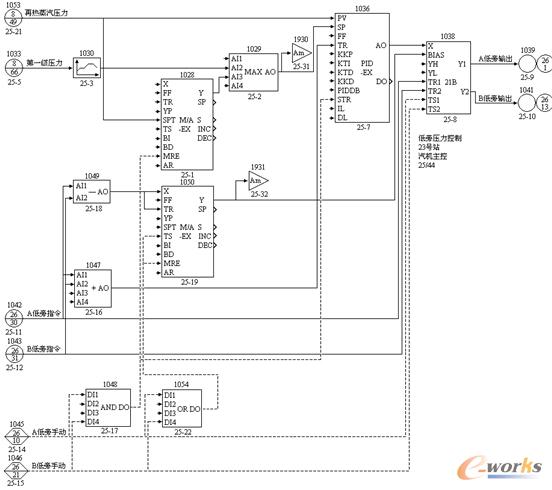
低旁A和低旁B均手动时,2路全处于盯梢状况,TS1=TS2=1,Y1=TR1=低旁A指令,Y2=TR2=低旁B指令。
当低旁A切手动时,低旁A指令由运转人员通过模仿手动站优化功用算法块1057输出Y,当低旁A主动方法时,Y=X=低旁A输出。
当低旁A维护快关动作时,TS=1,Y=TR=模仿量输入挑选算法块1063输出AO=AI1=0.00%,当低旁A指令与其阀位反应误差超越10%时,或逻辑算法块1060输出DO=1,模仿手动站优化功用算法块1057强制手动MRE=1,低旁A指令由运转人员通过模仿手动站优化功用算法块1057给出。
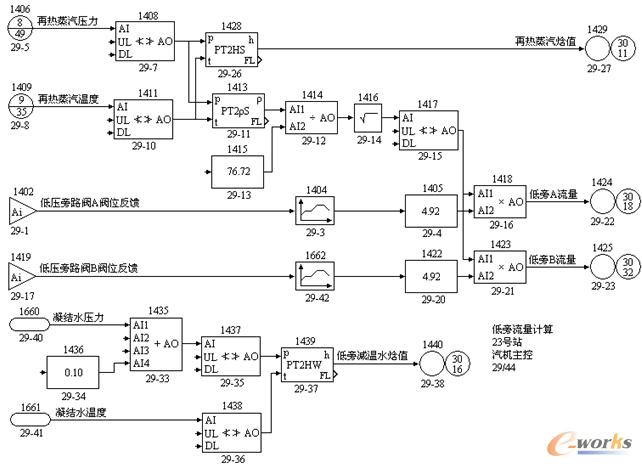
再热蒸汽压力和温度各自通过限幅算法块1408(幅值上限UL=4MPa,幅值下限DL=0MPa)、1411(幅值上限UL=600℃,幅值下限DL=0℃)今后,使用过热蒸汽参数算法块1428(MODE 2:PT2HSteam),输入压力p,温度t,输出再热蒸汽焓值h。
使用过热蒸汽参数算法块1413(MODE 3:PT2HSteam),输入压力p,温度t,输出再热蒸汽密度,除以系数992.4今后,进行开方、限幅算法块1417(幅值上限UL=1.05t/h,幅值下限DL=0.95t/h),与低压旁路阀A阀位反应进行分段线的值相乘,输出低旁A流量。
凝结水压力+0.10MPa通过限幅算法块1437(幅值上限UL=4MPa,幅值下限DL=0MPa),凝结水温度通过限幅算法块1438(幅值上限UL=60℃,幅值下限DL=0℃),至水和水蒸气参数算法块1439(MODE 0:PT2HWater),输入压力p,温度t,输出低旁减温水焓值h。

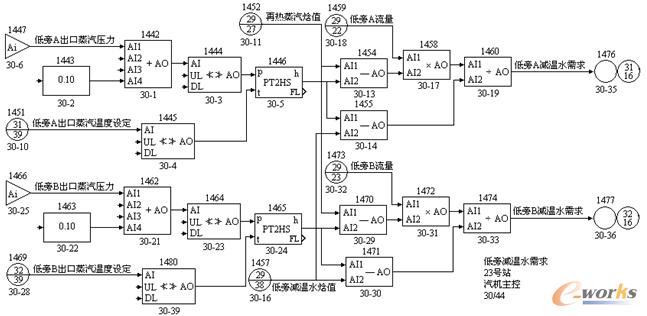
低旁A出口蒸汽压力+0.10MPa通过限幅算法块1444(幅值上限UL=1MPa,幅值下限DL=0MPa),低旁A出口蒸汽温度通过限幅算法块1445(幅值上限UL=200℃,幅值下限DL=0℃),至水和水蒸气参数算法块Ⅱ1439(MODE 2:PT2HSteam),过热蒸汽输入压力p,温度t,输出低旁A出口蒸汽焓值h。
低旁A出口蒸汽焓值h与再热蒸汽焓值之差乘以低旁A流量今后,再和其与低旁减温水焓值之差的比值,即为低旁A减温水需求。
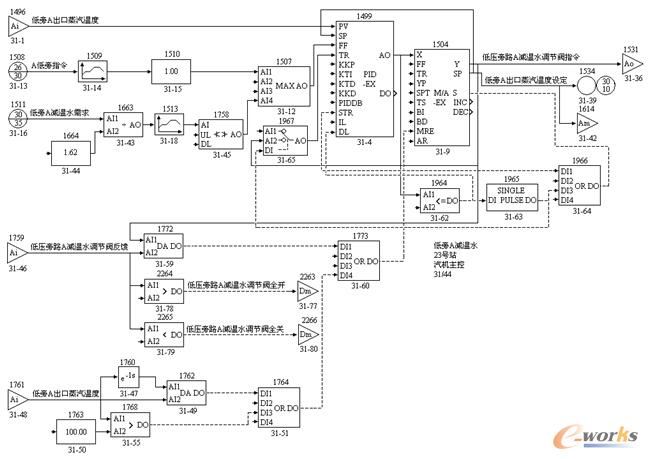
低旁A减温水PID优化算法块1499的进程变量PV为低旁A出口蒸汽温度,设定值SP由运转人员通过模仿手动站优化功用算法块1504给出。
前馈信号FF取最大值算法块1507的输出AO,比较输入为AI1、AI4,AI1为低旁A指令通过分段线)的值,分段线为低旁A减温水需求除以常系数1.62今后,通过分段线)今后的值,分段线 分段线的参数设置
盯梢值TR为模仿输入挑选算法块1967输出,当存在AO0%的1s
时,TR=AI1=-0.2%,不然,TR=AI2=Y,即当存在AO>0%的1s脉冲时,盯梢值TR为低压旁路A减温水调阀指令,当存在AO0%的1s脉冲,或许低压旁路A减温水调阀操控手动时,STR=1,PID优化算法块1499的输出AO=盯梢值TR。

当低旁A减温水调阀指令与反应误差超越15%时,或许低旁A出口蒸汽温度1s内改变>5℃,或许低旁A出口蒸汽温度>100.00℃,低旁A减温水模仿手动站优化功用算法块1504的强制手动MRE=1,低旁A减温水调阀指令Y由运转人员手动给定。当低压旁路减温水调节阀反应>95%时,宣布低压旁路减温水调节阀全开信号,当低压旁路减温水调节阀反应<5%时,宣布低压旁路减温水调节阀全关信号。
低压旁路体系将从锅炉再热器过来、不进入汽缸通流部分做功的蒸汽,通过降压、减温器,送至凝汽器,低压旁路在机组启停阶段投入运转,一般的情况下,退出旁路运转,其作用是缩短机组发动时刻,维护再热器,收回工质,下降噪音,低压旁路主动操控削减了运转人员对旁路体系的操作监督工作量。
手机网站
官方微信


 地址:
地址: 电话:
电话: 手机:
手机: 邮箱:
邮箱: